{var%20f='http://v.t.sina.com.cn/share/share.php?appkey=1515056452',u=z||d.location,p=['&url=',e(u),'&title=',e(t||d.title),'&source=',e(r),'&sourceUrl=',e(l),'&content=',c||'gb2312','&pic=',e(p||'')].join('');function%20a(){if(!window.open([f,p].join(''),'mb',['toolbar=0,status=0,resizable=1,width=440,height=430,left=',(s.width-440)/2,',top=',(s.height-430)/2].join('')))u.href=[f,p].join('');};if(/Firefox/.test(navigator.userAgent))setTimeout(a,0);else%20a();})(screen,document,encodeURIComponent,'','','https://www.rfask.net//data/attach/topic/topicNkBAf5.jpg', '推荐 微波射频网 的文章《从射频技术角度探讨汽车雷达的设计要点》','https://www.rfask.net/article-870.html','页面编码gb2312|utf-8默认gb2312'));){kind=link}
汽车雷达技术方兴未艾。无论是现阶段之盲点侦测,还是发展中的自动驾驶控制,高性能、高可靠性、小巧及低成本,是促进汽车雷达核心技术不断发展与完善不可或缺的因素与动机。
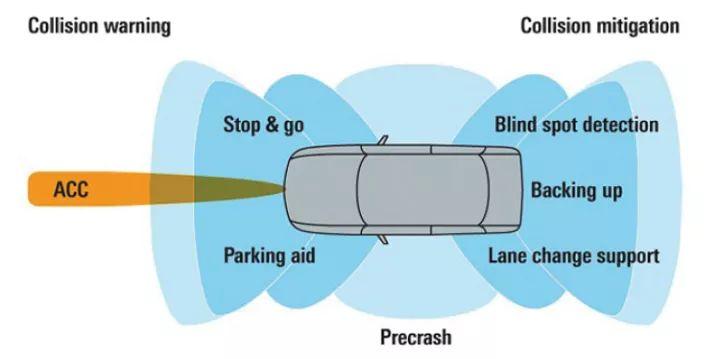
汽车雷达是驾驶辅助系统的重要组成部份。其不仅提供驾驶人员舒适从而减少紧张感的驾驶环境,更为全面提高道路交通安全奠定必要的基础。从设计汽车雷达及其最佳化到大量生产以及安装,都会使用到多种检验与测量方法。本文从射频(RF)测量技术角度探讨汽车雷达的若干设计要点。
雷达波形的线性度
与其他的雷达技术相类似,汽车雷达同样凭借接收目标物体的反射信号,并进一步分析接收信号与原始发射信号之间在时间、频率以及相位上的多重相关性,从而判断目标物体与雷达之间的相对速度与空间位置。
汽车雷达的核心技术之一是雷达波形设计。线性频率调变连续波(LFMCW,常简称为FMCW)是一种常用的雷达波形。发射信号(亦即波形)的稳定度与线性度直接影响雷达对目标物体的辨识能力。由于汽车雷达大多工作在毫米波频段,所选用的各种材料及元件固有的非线性特性都会纳入最终的发射信号与接收信号中,从而干扰信号分析演算法。
汽车雷达利用发射信号与接收信号之间相互关联的频率差与相位差,针对多个目标物体的速度与位置进行判断。当整个雷达系统,特别是发射机部份的线性度出现非理想特性时,频率差与相位差的计算结果将会产生模糊性,造成雷达系统无法正确判断目标物体,以致于发生重大差错。对于未来的自动驾驶控制技术来说,这是绝对要避免的。
为了最大程度地减少错误率,必须尽可能地提高发射信号的线性度,并凭借测量确保产品之线性度的稳定性。基于信号品质的严苛要求,线性度的测量大多采用高端的仪器设备,以降低测量误差。目前的高端仪器都可以分析带宽超过1-GHz的信号,以确保完整测量雷达信号。
汽车雷达正迅速扩展,为车辆提供更多驾驶辅助与更高安全性
天线设计与测量
在汽车雷达应用中,无论是发射天线还是接收天线,通常都使用相控阵列。按照整体设计需要,可以采用线性阵列或是平面阵列。
众所周知,阵列天线的主要参数(例如,主瓣方向及宽度、旁瓣抑制、零点位置等等)均可凭借简单的数学公式进行计算。然而,这种计算结果的适用性是有条件的,亦即当阵列中任两单元之间的相互耦合作用与影响极其微小至可以忽略不计的时候。有一种方法可使得上述的条件得以满足,就是增加阵列单元之间的相对距离。不过,这种方法所带来的影响是终端产品的尺寸也会随加大。
如果无法凭借计算达到有效并准确地设计阵列单元的目的,测量就成为最佳化过程中的重要手段,再以相应的电脑软件作为辅助,以利于大数据(big data)运算。阵列天线的最佳化通常分为下面几个步骤:
·阵列基本单元的辐射场型设计 ·阵列单元之间相互耦合的评估 ·天线阵列的辐射场型设计 ·阵列馈电系统设计 ·雷达收发系统整合设计 ·车辆保险杠影响之考量
除此之外,雷达系统的整体设计方案也必须包含安全便利性的要求。而安全便利性又会直接或间接地影响到天线的设计,可谓「牵一发而动全身」。
在设计阵列基本单元时,尤其是在评估阵列单元之间的相互耦合过程中,因为相控天线通常都具有较大的阵列单元数量,使得完整、准确且快捷的测量成为最关键的因素。而要实现完整又准确的要求,多端口矢量网络分析仪是必不可少的。
更进一步地考虑安全便利性的要求,汽车雷达同一批产品的辐射场型稳定性至关重要。而要达到这一目标,辐射场型测量设备首先必须具备良好的测量结果之可重复性。这也是汽车雷达测量技术的难点之一。
在一般情况下,天线辐射场型的测量必须在远场(far field)进行。这里的远场是一个相对的概念,按照目前业界常用的天线测量理论之定义,远场与被测量之天线的尺寸以及该天线的工作频率范围相关。具体来说,某一天线之远场与该天线的最大尺寸的平方成正比,而与该天线的工作波长成反比。
例如,某个汽车雷达产品的最大尺寸是7.5cm,如果它的工作频率处在24GHz,这时的远场大约在0.9m以外。但是如果它工作在77GHz,其远场将扩大到3m左右。在一般的量产条件下,这样大的距离范围几乎无法实现。
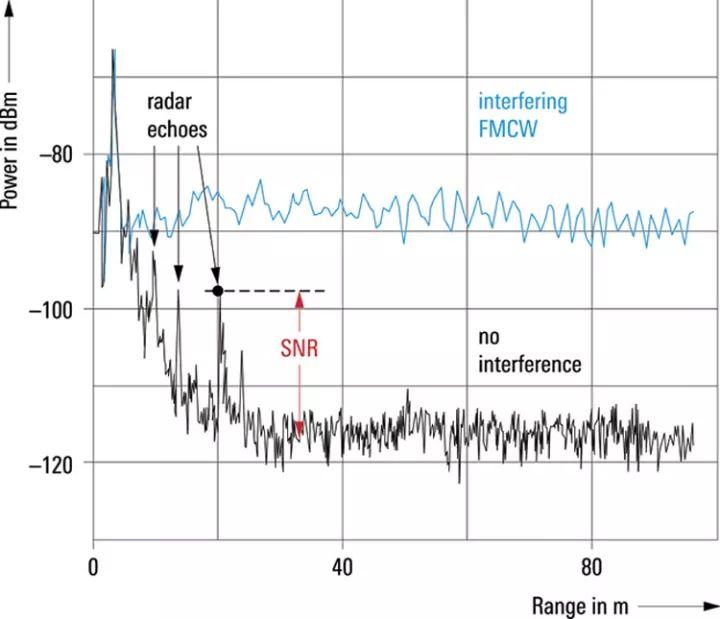
77GHz汽车雷达频谱的噪声
为了克服上述远场定义的局限性,可以选择在近场(near field)进行数据采集,然后凭借近场与远场的对应关系,将采集到的数据转换成远场的结果。虽然这种近场测量方法不再有距离范围的限制,但是,为了确保测量结果的精准度,不仅测量设备会变得相当复杂,数据采集所需的时间也会成倍增加。此外,因为数据转换需要额外的时间,使得整个测量过程变得十分冗长,以致于很难满足量产效能的要求。
目前业界正在研究全新的方法,以最大程度地降低上述空间与时间的限制,从而在适当的距离范围内,提高量产能力。
干扰与抗干扰
如同其他射频产品,对于汽车雷达也同样存在干扰与抗干扰的问题。从目前的技术来看,单一辆车上的雷达数量有超过十颗的趋势。所幸凭借天线的设计以及在安装时的适当调整,可以减少单一辆车上各个雷达之间的相互干扰。然而,目前还没有与汽车雷达相关的设计技术标准,汽车雷达所运作的频率范围更是无须申请许可证,因而对于不同车辆,特别是不同制造商的车辆,各车辆上雷达之间的相互干扰会是非常棘手的问题。
鉴于存在过多与干扰源相关的未知因素,在抗干扰能力的设计阶段,从最坏处着眼,兼顾那些最初看起来发生机率不高的场景,以便正确评估雷达系统被干扰后做出难以预期的反应。
如前所述,汽车雷达主要用来准确并快速地判断目标物体与雷达之间的相对速度与空间位置。错误的判断可分为两大类:一类是「幻视」,即「无中生有」;另一类是「盲视」,即「视而不见」。无论误判属于哪一类,都与交通安全息息相关,对于未来的自动驾驶控制技术来说,这些都是绝对要避免的。如果相对距离足够远,就会有充份的时间对误判进行修正。
因此,处于相对近距离时的误判将是十分危险的。应该如何评估「相对近距离」?举例来说,在城区内的道路上,通常的时速限制是60km/hr。以这样的速度换算一下,15m至20m就会是「相对近距离」。因为一旦在这个距离内出现交通异常,雷达系统必须迅速并有效地启动刹车系统,以便让行进中的车辆在一秒甚至更短的时间内停下来。但问题是,在这个距离内雷达系统可能发生上述的「幻视」抑或「盲视」吗?
答案是肯定的。也就是说,由于接收系统受到干扰,在特定的条件下(甚至包括天气的影响),汽车雷达系统对于目标物体反射回来的信号之敏感度会急剧下降,原本百米以外的目标物体都可以分辨,而此时就连十米左右的目标物体都难以辨识。
为了确保汽车雷达的抗干扰能力,标准化的测量方法是必要的。虽然目前尚无测量法规,业界还是可以参考其他类似的标准,先进行前期的可靠性测量,从而赢得时间提前测量,以便在正式的测量方法标准化之后,基于已有的数据,按照法规适当修正抗干扰余量,抑或提升抗干扰能力。
目前的抗干扰能力检测方法主要凭借软件设定场景,在电波暗室里,由信号源产生特定的雷达波形作为干扰源,再由雷达目标模拟器模拟特定的目标物体,以此评估被测雷达在该特定场景中对于目标物体反射信号之敏感度的下降程度,由此推算被测雷达在这一特定场景中对于特定干扰源的抗干扰能力。
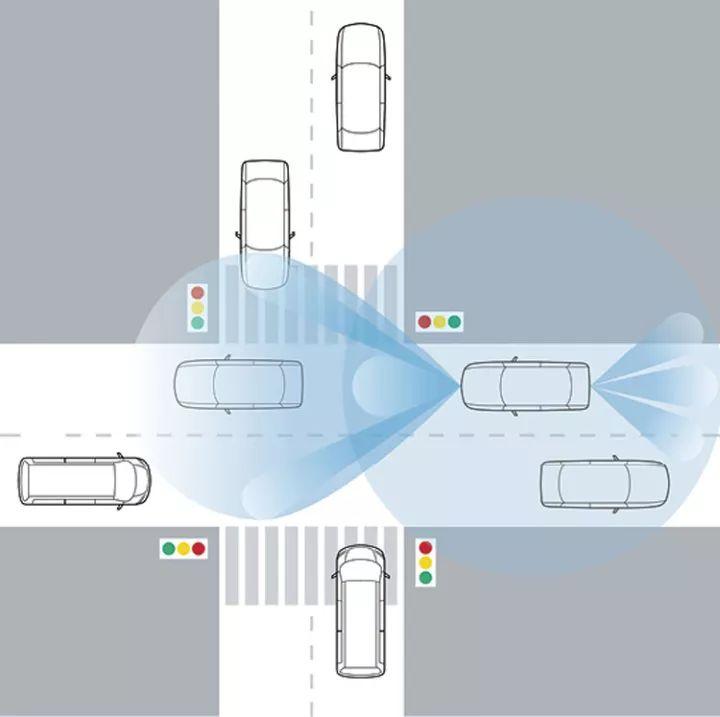
不同类型的汽车雷达感测器共享有限的免授权频谱,因而可能相互干扰
结语
综上所述,由于涉及极其重要的交通安全因素,在自动驾驶控制技术真正成为人们日常生活的一部份之前,其中关键技术之一的雷达技术还有待进一步的发展与完善,例如,雷达波形线性度的稳定性、量产的技术瓶颈、多种场景中的抗干扰能力等等。而与此密切相关的汽车雷达之射频测量技术,已经为精准的测试以及未来更高级的测量需求奠定了必要的基础。
作者:台湾R&S应用工程部经理 陈飞宇